
日本や世界の半導体メーカー・会社・企業【分野別で紹介】
製造業

LiDARはレーザー光を照射し、その反射光の情報をもとに対象物までの距離や対象物の形などを計測する技術であり、その計測精度の高さで3D形状計測などに使われてきた。
昨今では、自動運転車両、産業用ロボット、重機、スマートシティなど応用分野が急激な広がりを見せ、自動車業界だけでなく、ヘルスケア、航空宇宙、防衛、建設などさまざまな業界から注目が集まっているが、天候に左右される精度やデータ処理負荷などの実用化に伴う課題も残る。
今回のセミナーでは、内閣府SBIR発・芝浦工業大学認定スタートアップ企業としてハイパーデジタルツイン技術を活用したモビリティ事業及びスマートシティ事業を展開する「株式会社ハイパーデジタルツイン」のCEO伊東氏(芝浦工業大学 元教授・現特任研究員)とCTO新熊氏(芝浦工業大学 教授)をお招きし、LiDAR技術に関する最新の技術動向や課題について伺った。
※本記事は、ストックマーク株式会社が2024年9月27日に開催したオンラインセミナー、『芝浦工業大学 伊東氏・新熊氏に学ぶ LiDAR技術の現在地 〜最新技術と今後の課題~』の内容を中心にまとめたものです。

伊東 敏夫 氏
株式会社ハイパーデジタルツイン 代表取締役
学校法人芝浦工業大学 特任研究員
1982年~2013年: ダイハツ工業株式会社で運転支援・自動運転システムの研究開発に従事
1992年~1995年: 神戸大学博士後期課程で社会人学生としてコンピュータビジョンを研究
2013年~2023年: 芝浦工業大学教授として、自動運転システムの研究
2019年~2020年: 英国Loughborough Universityのデザインスクール交通安全研究所で自動運転でのヒューマンファクターを研究
2022年〜現在: (株)ハイパーデジタルツイン代表取締役

新熊 亮一 氏
株式会社ハイパーデジタルツイン 研究開発部、取締役
学校法人芝浦工業大学 教授
2000年〜2003年: 大阪大学博士前期・後期課程学生として、知的ネットワーク技術の研究
2003年〜2008年: 京都大学助教として、2008年〜2009年: 米国WINLABにて、異種混合ネットワークにおける協調の研究
2009年〜2021年: 京都大学准教授として、通信とコンピューティング融合領域の研究
2021年〜現在: 芝浦工業大学情報工学科教授として、ネットワークAIやデジタルツインの研究
2011年〜現在: 企業との共同プロジェクトや、産業フォーラムの会長、民間企業の技術顧問、スタートアップ企業設立者の立場で、研究成果の社会実装
2011年〜現在: 米国WINLAB、欧州カタルーニャ工科大学などとの国際共同研究
2022年〜現在: (株)ハイパーデジタルツイン取締役
LiDAR(Light Detection and Ranging)は、「光による検知と測距」と訳し、レーザー光を使って周囲の物体までの距離を検知する技術である。その類似技術である「電波レーダー」を搭載した多くのクルマが、現在街中を走っている。電波を使って周囲の物体までの距離を検知する点においては同じだが、LiDARは相手との距離だけでなく、形や大きさまで高精度にとらえることができるのが大きな特徴である。クルマを運転する際、前方のクルマとの距離だけでなく、周囲の歩行者、飛び出す自転車、障害物など、それらにも注意しなくてはいけない。この歩行者、自転車までの距離はもちろん、その形、大きさまで立体的にLiDARはとらえることができる。
電波レーダーは、2000年前後の時期から運転支援システムの主流であり、その技術は高速道路の定速走行や渋滞走行などで使われることが多かった。高速道路上には歩行者も自転車もおらず、観測する対象は先行車しかいないため、電波レーダーの解像度が悪くても充分とされていた。
この流れを変えたのが、米国国防省が開催したDARPA自動運転チャレンジだ。LiDARを搭載したスタンフォード・レーシングチームが快挙的な優勝を果たし、自動運転を目指す世界中の企業が、LiDARに注目した。その後、アウディのA8が自動運転レベル3の“開発”に成功し、さらにHondaが国土交通省と連携し、国土交通省は自動運転レベル3の市場化に向け、道路運送車両法の一部を改正し、LiDARを搭載した自動運転レベル3の世界初の“販売”を実現させた。
自動運転レベルを簡単に説明すると、人が主体となって行う自動運転がレベル0~レベル2、システムが主体となって行う自動運転がレベル3~レベル5である。人からシステムに移行するレベル2から3までの移行に、これまでとてつもなく大きな困難の壁があった。その困難をホンダが乗り越え、実現させたのがLiDAR技術である。
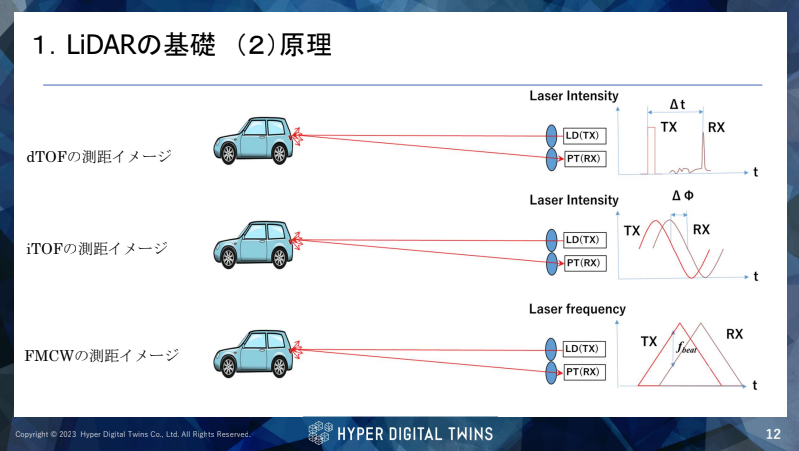
LiDARの測距方式には大きく分けて3つの主要な技術がある。それぞれの方式は特定の用途や条件に応じた利点を持ち、最近ではこれらを組み合わせることによる応用も広がっている。
この方式では、レーザー光の発射から反射光が戻るまでの時間を直接測定することで、対象物との距離を高精度に計測する。iTOFより長距離測定が得意であり、自動運転車の障害物検知や地形測量などに広く用いられている。近年の改良により、センサーの小型化とコスト削減が進んでいる。
連続波のレーザー光を利用し、その位相差を計測することで距離を算出する技術である。この方式は、ノイズ耐性が高く、短距離での高精度計測に優れている。スマートフォンやタブレットなどの民生機器にも採用され、顔認証やAR(拡張現実)の分野で応用されている。
周波数変調を活用し、ドップラー効果を利用して相対速度を一度の計測で算出できる技術である。これにより、高速移動する物体の検知やトラッキングが可能となり、物流や産業用ロボットなどの分野で活用が進むことが期待されている。